| 成都工业学院50万元以上大型贵重精密仪器设备简介 | ||||||||
| 设备编号 | 设备名称 | 品牌型号 | 生产厂家 | 单价(元) | 负责人 | 所在实验室 | 设备照片 | 功能简介 |
| 20220075 | 智能制造数字化实验平台 | JKJY-LPLWM | 中船舰客教育科技(北京)有限公司 | 1698000 | 康泽毓 | 004X03001_工业机器人系统集成实验室 |
|
智能制造数字化实验平台包含供料、检测分拣、打磨、音乐定制烧录、机器人装配、激光雕刻加工、仓储、MES、APP、云端数据服务等多个工艺对象,包含工业机器人、RFID、工业网关、工业网络、云数据服务、虚拟仿真、工业安全、能源管理、智能传感、机器视觉、PLC、变频、伺服、组态、人机接口以及系统操作、排故、运维等先进智能产线技术。 |
| 20240006 | 双臂人形机器人科研创新平台 | Baxter hero | 湖南瑞森可机器人科技有限公司 | 985000 | 康泽毓 | 004X03007_机电拆装实验室 |
|
双臂人形结构,拥有完整的“脑”“眼”“手”“脚”结构,采用深度学习框架,具备强大的认知能力,包括人脸、物体识别能力和自然语言交互能力。开源的操作系统,支持智能语音、智能视觉、智能导航、灵巧操作等能力;支持机器人灵巧抓取,提供至少20种抓取手势的手势库的双臂灵巧抓取。 |
| 20200597 | 三维视觉智能应用平台 | HZ-VII-V01E | HZ | 889600 | 王强 | 004X03003_机器视觉实验室 |
|
三维视觉智能应用平台模拟药品分装产线。可开展相机标定、2D\3D视觉检测、机器人分拣、PLC控制等研究项目。平台的构成有:①检测辨认平台,主要完成对药瓶的识别。搭建3D结构光相机, 利用机器视觉技术,获取药瓶位置信息,并传输给机器人,实现机器人药瓶自动抓取。②动态定位平台,完成药粒的识别和抓取。采用2D相机完成拍照与识别,同样将药粒位置坐标传递给机器人,实现追踪抓取,并将药粒放入瓶内。③静态定位平台,实现对相应药瓶盖的识别。利用2D相机通过对瓶盖上二维码信息的识别,最终将对应瓶盖放到药瓶上,并自动完成旋拧瓶盖及最后入仓 |
| 20191659 | 大气与水污染粒子成像系统(PIV) | DM3-2M200 | 北京立方天地科技发展有限责任公司 | 835000 | 邓玉 | 013X01_无人机联合开发实验室 |
|
由采样泵取样,通过进样管将少量示踪粒子倒入容器中,加入水搅拌后倒入测试取,在光源照耀下,高速相机对示踪粒子进行拍摄,结合显微设备进行微管道流场显像和数据测量。 应用领域有:1、洁净环境;2、过滤器性能评核;3、数据统计;4、检测、监测和分析。 |
| 20210651 | 微波信号产生系统 | SMA100B | 成都飞易驰电子科技有限公司 | 804460 | 龙宁 | 006X02004_电子通信综合设计实验室 |
|
该仪器基于7英寸触摸屏操作,用于产生射频信号,信号频率范围最高可达50GHz;输出幅度范围最高为8 dBm;输出幅度精度:<1dB;SSB相位噪声极小:<-140dBc/Hz;杂散CW offset > 10 kHz from carrier, level = 10 dBm;谐波:<-55dBc;宽带噪声:< -140dBc,对外具有LAN通信接口。 |
| 20191391 | 多功能信号分析单元 | DG-I2016 | 大公博创 | 738000 | 舒彭 | 006X05005_无线电监测培训室 |
|
设备可对20MHz~8000MHz信号进行长期扫描,自动提取信号并按照无线电业务进行信道化处理;能够实现对出现的信号进行特征计算和记录,形成表征当地信号的信号字典。 能同时对32路窄带和2路宽带信号多个频点进行分析,支持自动分析和精确的人工分析。信号制式识别: AM、FM、BPSK、QPSK、16QAM、2FSK、4FSK、GMSK等;传输系统识别:包含GSM、模拟电视、数字电视、TETRA、CDMA、LTE等; |
| 20200599 | 电液伺服拉扭复合疲劳试验机 | QBS-50N500B | QBS | 705075 | 贾美薇 | 004X03003_机器视觉实验室 |
|
QBS型系列电液伺服疲劳试验机采用双立柱、伺服作动器总成上置或下置结构形式,主要用于对各种材料、零部件进行疲劳试验、断裂力学性能试验、拉压弯剪等静态性能试验等。用电液伺服闭环控制原理,伺服作动器全部采用非金属摩擦,具有响应速度快、精度高、频带宽、波形种类多(正弦波、方波、三角波)等特点。在各行业的力学性能测试领域,特别是在疲劳性能试验、断裂力学性能试验等方面更是有着广泛的应用。 |
| 20191669 | 伺服节能注塑机 | 450SeKⅡ | 东华机械有限公司 | 687500 | 李萌崛 | 001X02004_模具加工中心 |
|
该设备为液压驱动,卧式结构。螺杆直径:70mm,理论注射容量:1424立方厘米,螺杆转速:170rpm,射胶行程:370mm,螺杆行程:435mm,移模行程:740mm,最大模厚:820mm,最小模厚:300mm,顶出行程:250mm,模板最大距离:1560mm,总功率:88.5kw。 |
| 20190945 | 双臂协作机器人 | YuMi-IRB 14000 | ABB(中国)有限公司 | 640000 | 丁超 | 004X03004_机电一体化实验室 |
|
该型机器人是ABB YuMi双臂协作机器人,具有两条7轴自由度轻质合金手臂,灵敏度高,能模拟人类肢体动作,提高空间利用率。YuMi具有碰撞感知,比如与人类同事相碰,能在几毫秒内暂停运动。现在展示的是关于双臂机器人利用视觉技术,运动控制技术,实现扑克牌的不同花色的识别,并分类进行堆放作业的过程。 |
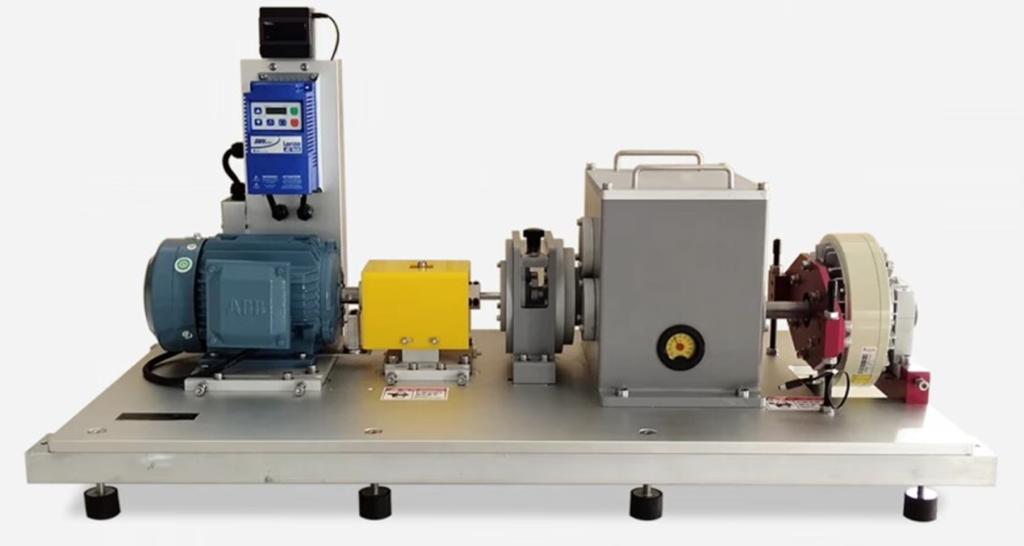
| 20200598 | 故障诊断综合研究平台 | DCDS 定制 | DCDS | 623870 | 左芳君 | 004X03003_机器视觉实验室 |
|
动力传动故障模拟实验台(DCDS)由一个2级行星齿轮箱、一个2级平行轴齿轮箱、一个轴承径向负载装置和一个可编程控制的磁粉制动器组成。该实验台包含了齿轮传动全部所需配置,适用于基于诊断技术、 润滑条件、磨损颗粒分析的齿轮箱动力学和噪声特性、健康监测和振动特性的研究。该实验台全部模块化设计,性能稳定,可承受冲击载荷,便于齿轮的更换、安装以及监测装置的安装。 |
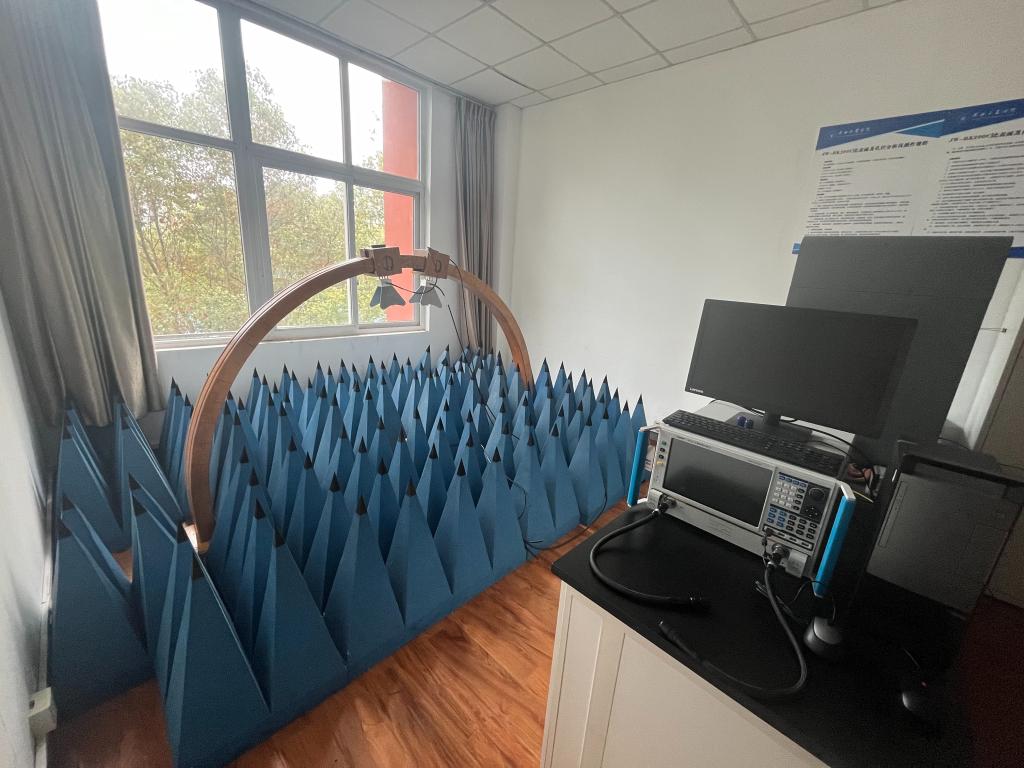
| 20211060 | 微波一体化矢量网络分析及弓形法平板反射率测试系统 | 定制 | 中电科仪器仪表有限公司 | 588500 | 胡书春 | 001X01001_热处理实验室 |
|
微波一体化矢量网络分析及弓形法平板反射率测试系统是一套集矢量网络分析与弓形法平板反射率测试于一体的先进设备系统,具有同轴法、波导法及弓形法等测试模式。可在10MHz~43.5GHz范围内测试材料的介电常数、磁导率等参数;可在1-40 GHz范围内测试平板材料反射率。 |
| 20190976 | 机器人六维姿态测量系统 | AutoArm900 | 上海欧潼精密设备有限公司 | 561000 | 丁超 | 004X03004_机电一体化实验室 |
|
Auto Arm三坐标测量机是一种用于工件尺寸、形状和位置测量的设备。它具有三个坐标轴(X、Y、Z),可在多个方向上移动,配备高精度的测量传感器。主要用于工业质量控制和检测,能快速准确地测量工件特征,提高生产效率和产品质量。 |
| 20191690 | 豪克能斜床身数控车 | H+HTC450 | 山东华云机电科技有限公司 | 560000 | 李萌崛 | 001X02004_模具加工中心 |
|
斜床身数控车床是一种数控机床,其床身倾斜角度通常在30°左右。斜床身设计使得刀具更容易接近工件,提高了加工精度和效率。斜床身数控车床由数控系统、主轴箱、床身、进给系统、润滑系统等多部分组成。其特点:1.高稳定性:斜床身结构使得机床的重心向下移动,增加了机床的稳定性。2.高精度:斜床身设计减少了机床振动和工件变形,提高了加工精度。3.高效率:斜床身设计使得刀具更容易接近工件,减少了空转时间,提高了加工效率。4.多功能:斜床身数控车床可进行多种形状的加工,如镗孔、车削、齿轮加工等。 |
| 20210653 | 频域分析系统 | FSV3044 | 成都飞易驰电子科技有限公司 | 524227 | 龙宁 | 006X02004_电子通信综合设计实验室 |
|
该仪器用于对信号进行频谱分析,频率范围最高可达44GHz;参考频率精度1×10–6;相位噪声低于–106 dBc/Hz;最小分辨率带宽1Hz;最大信号分析带宽28MHz;1dB压缩为+6dBm;TOI(f=1GHz,典型值) +12dBm;总体测量不确定度≤2.0dB;最大扫描时间10000 s;耦合方式兼容AC或DC。 |
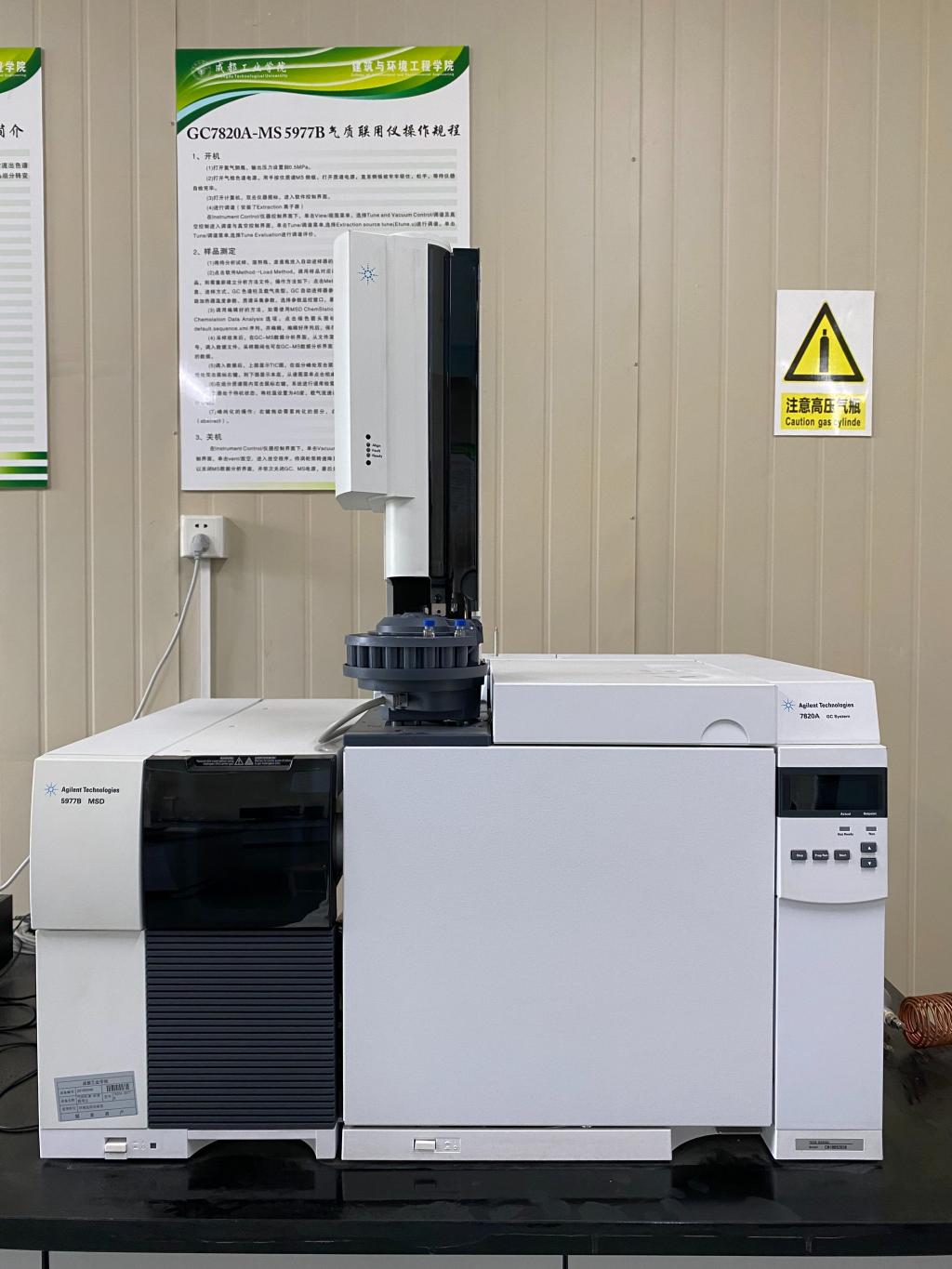
| 20180046 | 气相色谱-质谱联用仪 | 7820A-5977B | 520000 | 梁庆玲 | 001X06_环境工程实验室 |
|
气质联用仪是由气相色谱仪和质谱仪两部分组成,化合物首先进入到气相色谱仪中,利用气相色谱仪的分离原理, 按保留时间的不同被分离开来,再逐一的进入到质谱仪中。每个化合物在质谱仪的离子源里都被电子轰击,从而被打碎 ,变成一个个断裂的分子片断,每一个分子片断根据分子量的大小先后通过四极杆检测器,并被检测器记录下来,形成质谱图。研究人员根据得到的质谱图,对未知化合物进行定性和定量分析。 | |